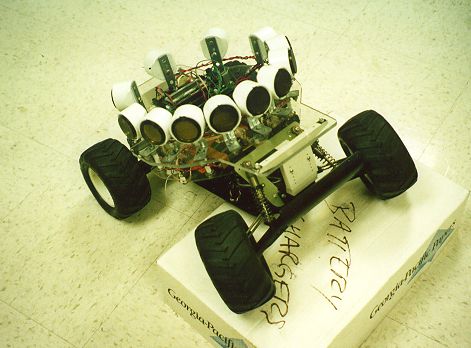

The Smart-V is a commercial remote controlled vehicle, turned into an autonomous robot at our lab. The first version of this project was developed by David Musliner and could run autonomously or under external control via a wireless modem.
In 1997, the Smart-v was redesigned as an undergraduate robotics project. The new version is completely autonomous, more robust, and significantly improved in design.
A key to the success of smart-v is a sonar ring for the 6.270 board developed by Dr. Musliner.