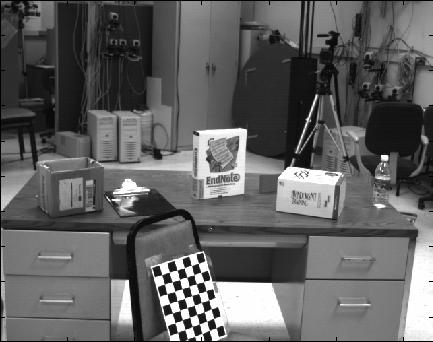
Fig 1: first image used.
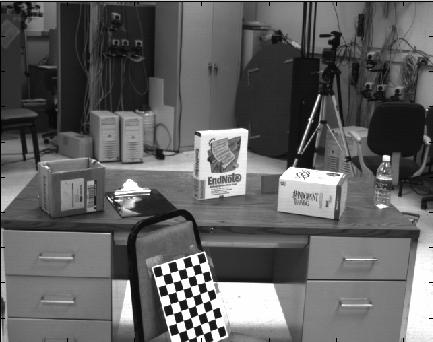
Fig2: second image used.
In this project we are to take two still from a video and find out the direction in which the camera is moving. The theory behind the idea is explained in [1] in great detail. The following are the steps I took to figure out the rotation and translation.
1. Smoothen the images and get the dx, dy and dt. I took two different pairs of images. I did not get a good final result with the first set. So I present the second set only.
|
Fig 1: first image used. |
Fig2: second image used. |
2. Plot the flows and the then superimpose the a,b and g vectors. Identify the patterns that are generated. Based on the patterns we can identify the kind of rotation and translation.
The following table illustrates my results. The images on the middle were generated using the above images. The images on the right were generated through my first set of images. It is obvious that the results for this set is very not clear.
| Vectors superimposed. | Image in Fig 1 and Fig 2. | My original set of images. |
| alpha vectors |
|
 |
| beta vectors |
|
|
| gamma vectors |
|
 |
It is quite clear from the above that there is a rotation about the z axis, as is shown by the projection of gamma vectors on images from Fig 1 and Fig2.
References.
[1] C. Fermüller and Y. Aloimonos, ``Qualitative egomotion,'' International Journal of Computer Vision 15, 7-29, 1995.