
About Me
Welcome to my homepage! I am a Research Scientist at Adobe Inc. I completed my Ph.D. in Computer Science at the University of Maryland, College Park, USA, where I was advised by Dr. Dinesh Manocha. My research interests span the domains of affective computing and human motion recognition and synthesis. I am currently working on automated techniques to generate and edit multimodal content consisting of text, images, and videos. During my previous internship at Google Research in Mountain View, I developed automated techniques to generate 3D animations of co-speech human facial expressions and body gestures corresponding to different emotions in a variety of social contexts. I have also worked as an intern at Adobe Research in San Jose, on novel problems in automated video editing and highlight detection from videos. Before coming to Maryland, I completed my Master of Engineering and then worked one year as a research associate with Dr. Venu Madhav Govindu at the Department of Electrical Engineering, Indian Institute of Science, where I developed efficient and robust algorithms for robust large-scale 3D reconstructions of objects and scenes from RGB images and raw depth maps.
Latest News
June 2024 [Upcoming]
One paper at CVPR 2024
May 2024 [Upcoming]
One paper at ICLR 2024
February 2024
One paper at AAAI 2024
November 2022
Best paper award at ACM MIG 2022
Media Coverage
April 04, 2019
UMD professor builds simulator to train self-driving cars
Education
Ph.D. in Computer Science
2018 - 2022
University of Maryland, College Park, USA
Advisor: Dinesh Manocha
M.E. in System Science and Automation
2015 - 2017
Indian Institute of Science, Bengaluru, India
Advisor: Venu Madhav Govindu
B.Tech. in Computer Science and Engineering
2011 - 2015
West Bengal University of Technology, Kolkata, India
Professional Experience
Research Scientist
September 2022 - Present
Adobe Inc., San Jose, CA, USA
Research Intern
May 2022 - August 2022
Google Inc., Mountain View, CA, USA
Multimedia Systems Research Intern (Remote)
May 2021 - August 2021
Adobe Inc., San Jose, CA, USA
Data Science Research Intern (Remote)
May 2020 - March 2021
Adobe Inc., San Jose, CA, USA
Research Assistant
January 2019 - May 2022
University of Maryland, College Park, USA
Teaching Assistant
August 2018 - December 2018
University of Maryland, College Park, USA
Research Associate
July 2017 - May 2018
Indian Institute of Science, Bengaluru, India
Teaching Assistant
August 2016 - December 2016
Indian Institute of Science, Bengaluru, India
Software Engineer Intern
June 2014 - July 2014
Tata Consultancy Services Innovations Lab, Kolkata, India
Services
Conference Senior Program Committee Member
AAAI 2024, 2023.
Journal Reviewer
ACM SIGGRAPH Asia 2023, 2022. ACM SIGGRAPH 2023, 2022. AIRE 2021. CVIU 2020. RA-L 2021. IEEE TAffC 2023. IEEE ToM 2022. IEEE TVCG 2023.
Conference Reviewer
AAAI 2022, 2021. ACCV 2020. ACMMM 2024, 2023. CVPR 2024, 2023, 2022, 2021, 2020. ECCV 2024, 2022. ICCV 2023, 2021. ICLR 2024, 2023, 2022. ICML 2024, 2022. ICRA 2020. IEEEVR 2024, 2023. IROS 2020. NeurIPS 2023, 2022, 2021, 2020. WACV 2024, 2022, 2021.
Conference/Journal External Reviewer
ACM SIGGRAPH 2020. ICRA 2020. IEEEVR 2020. IROS 2019.
Conference Volunteer
AAAI 2020. CVPR 2019. SPCOM 2016.
Awards and Nominations
ACM MIG 2022 Best Paper Award
"Learning Gait Emotions Using Affective and Deep Features" by
Tanmay Randhavane, Uttaran Bhattacharya, Pooja Kabra, Kyra Kapsaskis, Kurt Gray, Dinesh Manocha, and Aniket Bera.
UMD Invention of the Year Award 2022 Nominee
"Deepfake Detection Tool" by Trisha Mittal, Aniket Bera, Uttaran Bhattacharya, Rohan Chandra, and Dinesh Manocha.
UMD Invention of the Year Award 2021 Nominee
"M3ER: Multiplicative Multimodal Emotion Recognition" by Trisha Mittal, Aniket Bera, Uttaran Bhattacharya, Rohan Chandra, and Dinesh Manocha.
ACMMM 2021 Best Paper Award Nominee
"Speech2AffectiveGestures: Synthesizing Co-Speech Gestures with Generative Adversarial Affective
Expression Learning" by Uttaran Bhattacharya, Elizabeth Childs, Nicholas Rewkowski, and Dinesh Manocha.
IEEE VR 2021 Best Paper Award
"Text2Gestures: A Transformer-Based Network for Generating Emotive Body Gestures for Virtual
Agents" by Uttaran Bhattacharya, Nicholas Rewkowski, Abhishek Banerjee, Pooja Guhan, Aniket Bera,
and Dinesh Manocha.
Adobe Research Fellowship, 2021
Adobe Inc.
ACM SAP 2019 Best Poster Award
"Identifying Emotions from Walking Using Affective and Deep Features" by
Tanmay Randhavane, Uttaran Bhattacharya, Aniket Bera, Kyra Kapsaskis, Kurt Gray,
and Dinesh Manocha.
Dean's Fellowship, 2018
University of Maryland, College Park, USA.
Outstanding Student Award, 2013
Institute of Engineering and Management under the West Bengal University of Technology,
Kolkata, India.
Research Interests
- All
- Multimodal Content Creation
- Affective Computing

Bibliography
Selected Publications
Multimodal Content Creation
-
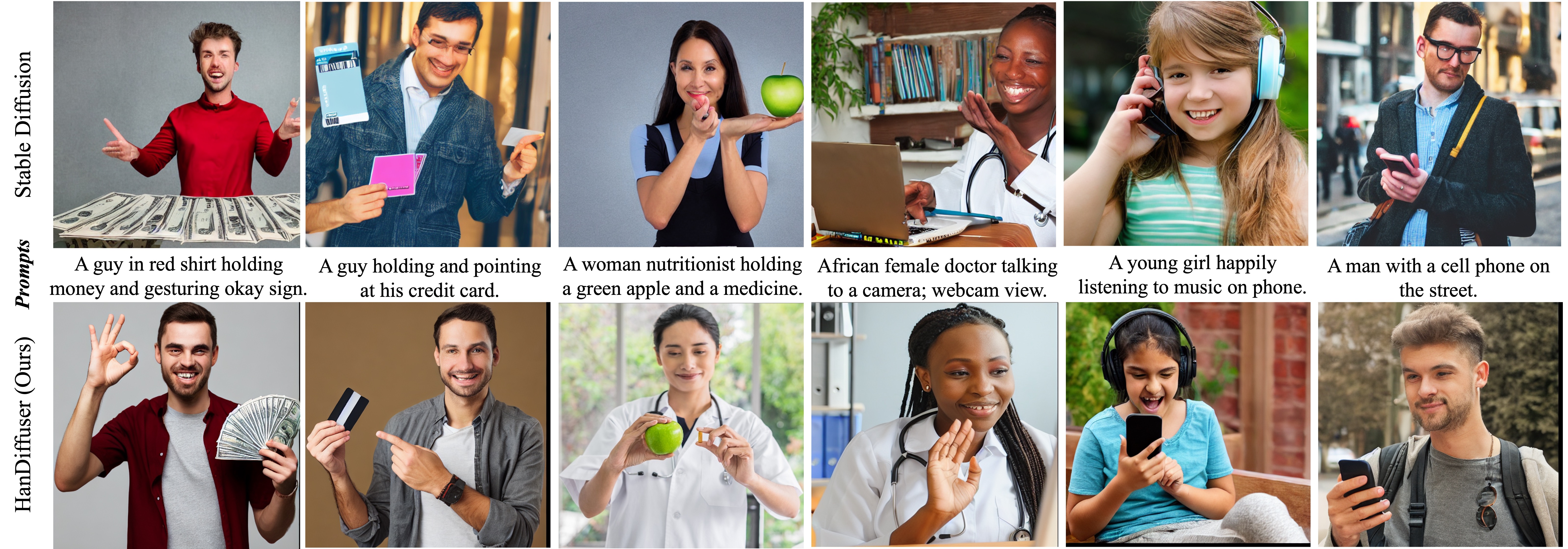
Supreeth Narasimhaswamy, Uttaran Bhattacharya, Xiang Chen, Ishita Dasgupta, and Saayan Mitra.
"HanDiffuser: Text-to-Image Generation With Realistic Hand Appearances".
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
Conference Poster Paper [to appear] Google Scholar [to appear] -
Ashmit Khandelwal, Aditya Agrawal, Aanisha Bhattacharyya, Yaman K Singla, Somesh Singh, Uttaran Bhattacharya,
Ishita Dasgupta, Stefano Petrangeli, Rajiv Ratn Shah, Changyou Chen, and Balaji Krishnamurthy.
"Large Content And Behavior Models To Understand, Simulate, And Optimize Content And Behavior".
International Conference on Learning Representations (ICLR), 2024.
Conference Spotlight Paper Google Scholar -
Aneesh Bhattacharya, Manas Paranjape, Uttaran Bhattacharya, and Aniket Bera.
"DanceAnyWay: Synthesizing Beat-Guided 3D Dances with Randomized Temporal Contrastive Learning".
Association for the Advancement of Artificial Intelligence (AAAI), 2024.
Conference Poster Paper Code Google Scholar
Affective Computing
-
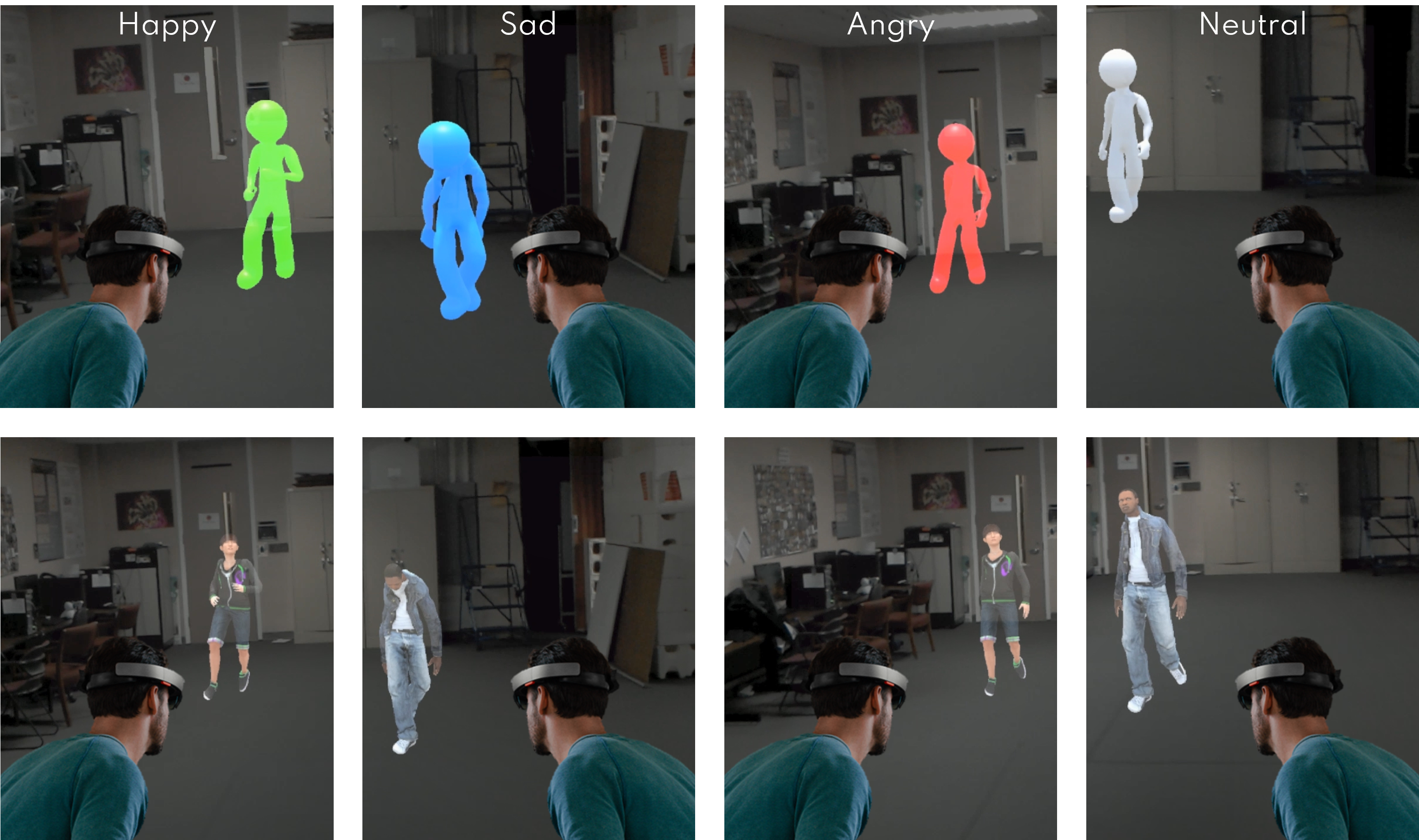
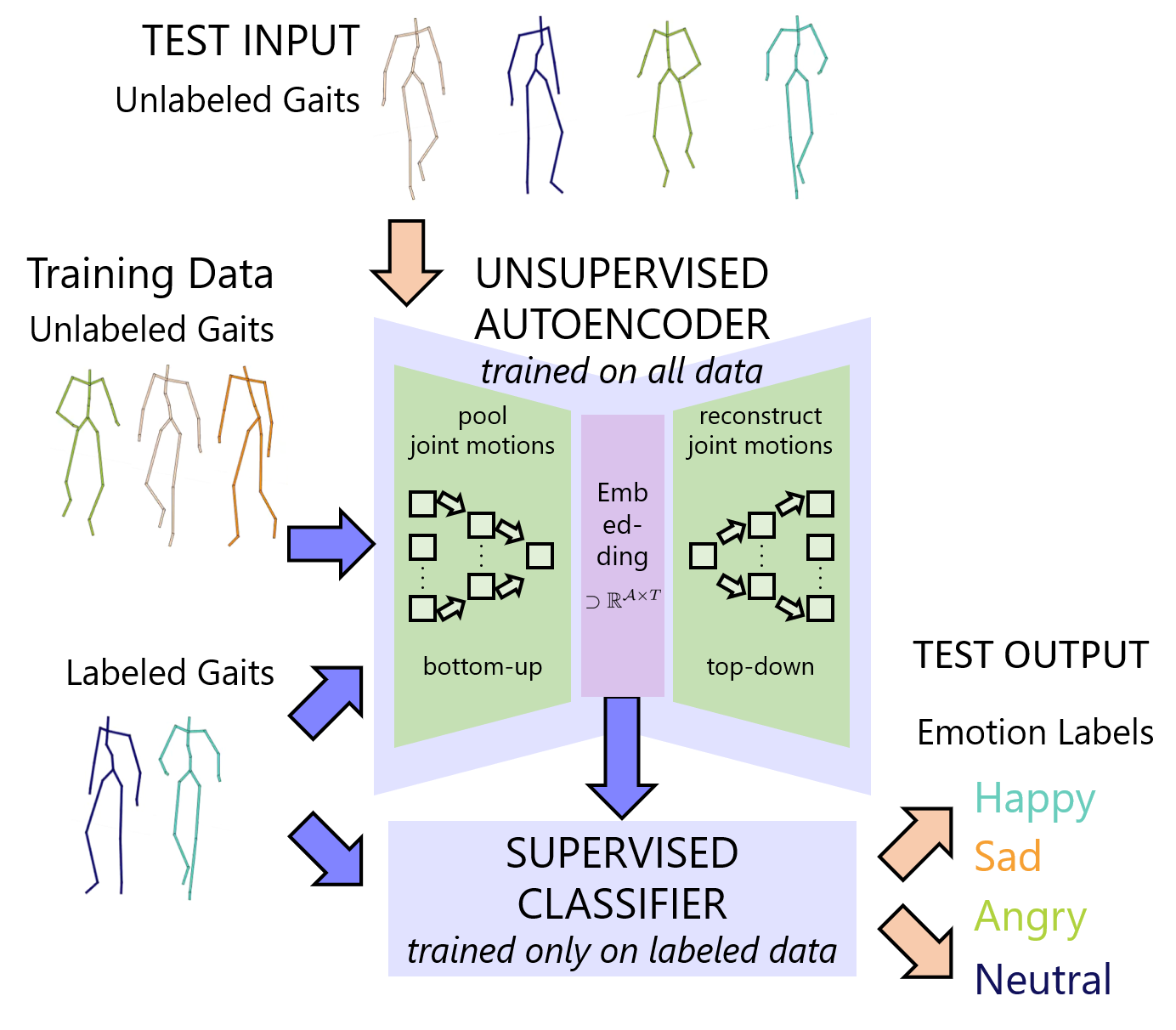
Tanmay Randhavane, Uttaran Bhattacharya, Pooja Kabra, Kyra Kapsaskis, Kurt Gray, Dinesh Manocha, and Aniket Bera.
"Learning Gait Emotions Using Affective and Deep Features".
ACM SIGGRAPH Conference on Motion, Interaction and Games (MIG), 2022.
Conference OralBest Paper Paper Google Scholar -
Uttaran Bhattacharya, Gang Wu, Stefano Petrangeli, Viswanathan Swaminathan, and Dinesh Manocha.
"HighlightMe: Detecting Highlights from Human-Centric Videos".
IEEE/CVF International Conference on Computer Vision (ICCV), 2021.
Conference Poster Paper Google Scholar -
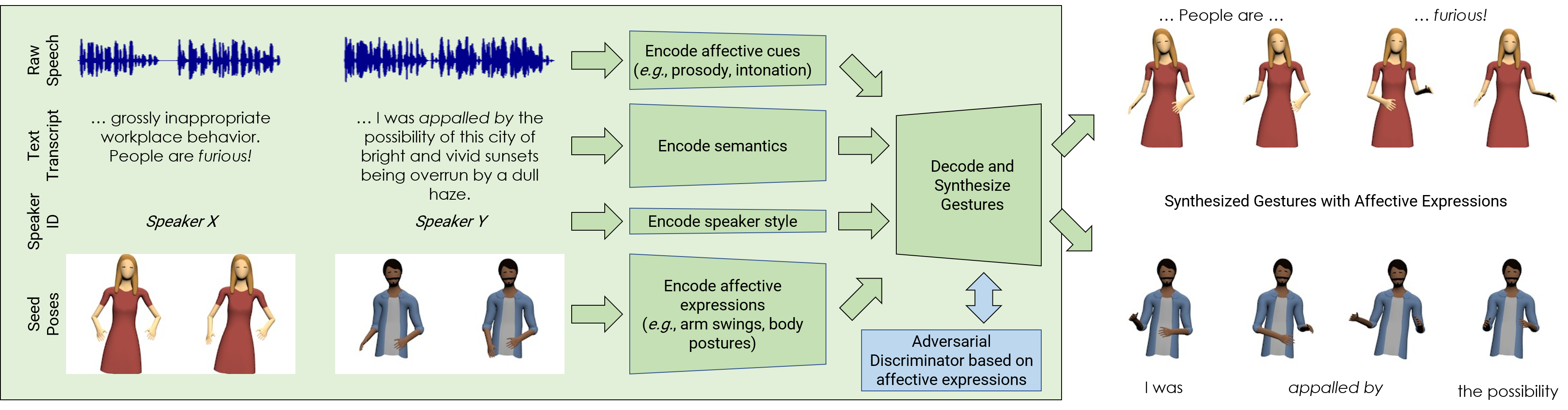
Uttaran Bhattacharya, Elizabeth Childs, Nicholas Rewkowski, and Dinesh Manocha.
"Speech2AffectiveGestures: Synthesizing Co-Speech Gestures with Generative Adversarial Affective
Expression Learning".
ACM International Conference on Multimedia (ACMMM), 2021.
Conference OralBest Paper Nominee Paper Project Code Google Scholar -
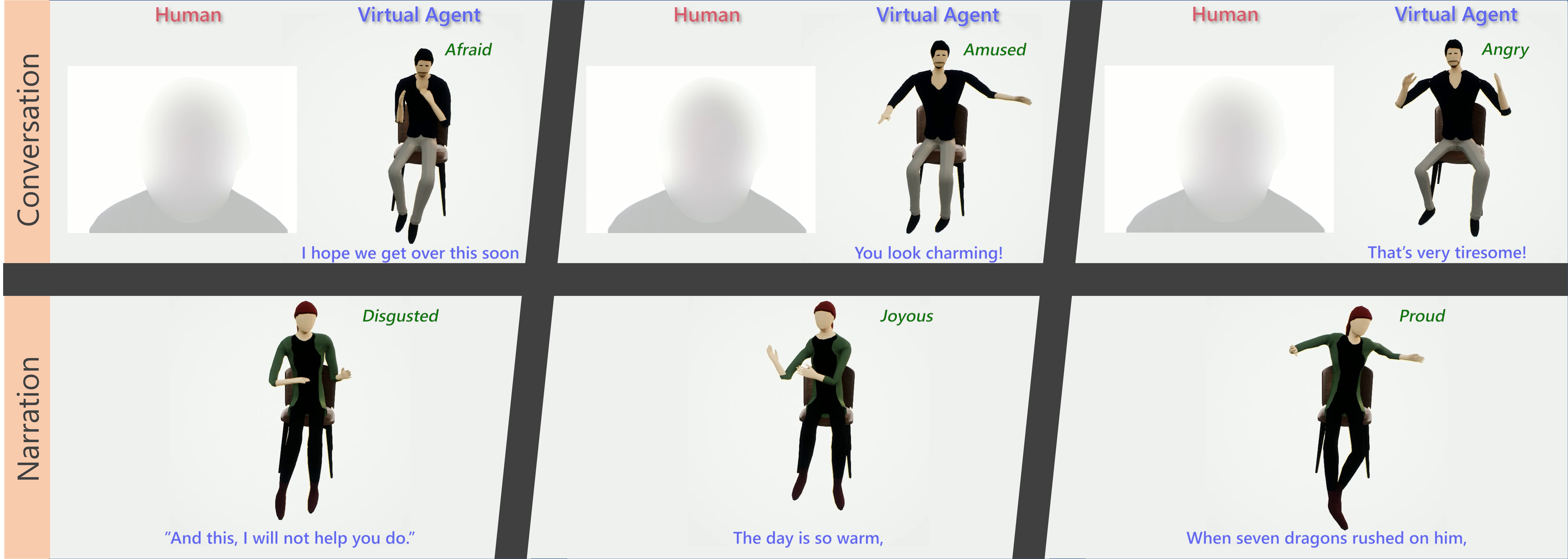
Uttaran Bhattacharya, Nicholas Rewkowski, Abhishek Banerjee, Pooja Guhan, Aniket Bera, and Dinesh Manocha.
"Text2Gestures: A Transformer-Based Network for Generating Emotive Body Gestures for Virtual Agents".
IEEE Conference on Virtual Reality and 3D User Interfaces (IEEE VR), 2021.
Conference OralBest Paper Paper Project Code Google Scholar -
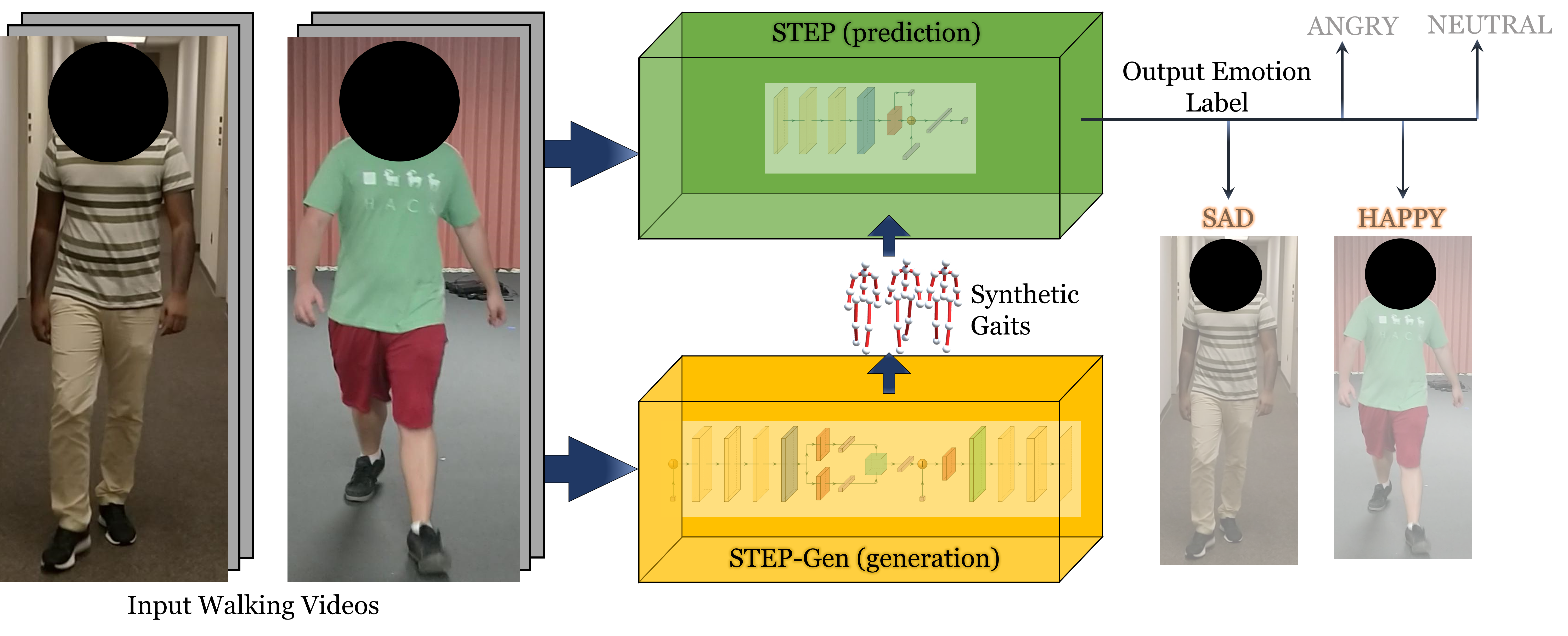
Uttaran Bhattacharya, Trisha Mittal, Rohan Chandra, Tanmay Randhavane, Aniket Bera, and Dinesh Manocha.
"STEP: Spatial Temporal Graph Convolutional Networks for Emotion Perception from Gaits".
Association for the Advancement of Artificial Intelligence (AAAI), 2020.
Conference Spotlight Paper Project Code Google Scholar
3D Scene Reconstruction
-
Uttaran Bhattacharya, and Venu Madhav Govindu.
"Efficient and Robust Registration on The 3D Special Euclidean Group".
IEEE/CVF International Conference on Computer Vision (ICCV), 2019.
Conference Poster Paper Google Scholar -
Uttaran Bhattacharya, Sumit Veerawal, and Venu Madhav Govindu.
"Fast Multiview Registration of 3D Scans using Planar Structures".
International Conference on 3D Vision (3DV), 2017.
Conference Spotlight Paper Google Scholar
Preprints
- Yizhou Wang, Ruiyi Zhang, Haoliang Wang, Uttaran Bhattacharya, Yun Fu, and Gang Wu. "VaQuitA: Enhancing Alignment in LLM-Assisted Video Understanding".
Contact
< first 4 letters of name >005 [AT] < Google Mail >
San Jose, CA, USA