Understanding generalization through visualization
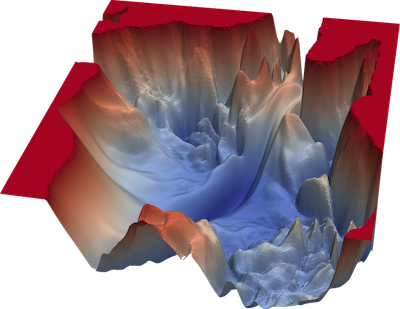
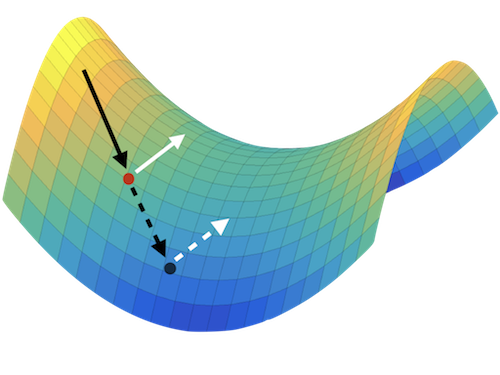
The power of neural networks lies in their ability to generalize to unseen data, yet the underlying reasons for this phenomenon remain elusive. Numerous rigorous attempts have been made to explain generalization, but available bounds are still quite loose, and analysis does not always lead to true understanding. The goal of this work is to make generalization more intuitive. Using visualization methods, we discuss the mystery of generalization, the geometry of loss landscapes, and how the curse (or, rather, the blessing) of dimensionality causes optimizers to settle into minima that generalize well.