CMSC733 Computer Processing of Pictorial Information
|
General Information |
|
|
|
Announcements:
Description
This class will provide a general, graduate level introduction to computer vision. We will attempt to give students a broad understanding of all important topics in computer vision.
Prerequisites
Knowledge of and comfort with mathematics
will be very helpful. At a minimum, students should know multivariable calculus
and linear algebra. No knowledge of computer vision will be assumed, but we
will go quickly, so some background in computer vision will certainly be
helpful.
Text
There is no single required text. Required readings for the class will be listed below, and will be available online. Three books that will be useful are:
·
A draft of Richard Szeliski's
computer vision book is available online. There will be some required
readings from this book.
· Introductory Techniques for 3-D Computer Vision by Trucco and Verri. This is more of an undergraduate text, and a bit old, so many topics are not covered. However, the fundamentals are explained very clearly.
·
Computer Vision: A Modern Approach by Forsyth
and
Assigned work for the class will consist of problem sets (40% of grade), a take-home midterm (20%), and a final exam (40%).
Problem Sets
|
|
Assigned |
Due |
|
|
Problem Set 1 |
9/17/13 |
10/1/13 |
Edge Detection. Implement 2D edge detection, paper and pencil problems
about convolution. Problem Set
You will also use the following Matlab files: test_smooth_image.m, test_image_gradient.m, test_gradient_magnitude_direction.m, interpolate_gradients.m, and the images: swanbw.jpg, swanedges.jpg, swanedges_h.jpg |
|
Problem Set 2 |
10/1/13 |
10/17/13 |
Normalized Cut and Texture Synthesis. Problem Set. To test your normalized cut code, you will use the routine: test_normalized_cut_points.m. My results with this routine
are here
and here. For texture synthesis, look at the Efros and Leung paper. You can use the brick image to
test your code. |
|
Problem Set 3 |
10/17/13 |
10/31/13 |
E-M and Mosaicing. Problem Set. For the mosaicing problem, you will use these
images: Image
1 Image 2 and this matlab
code. |
|
Midterm |
10/31/13 |
11/7/13 |
|
|
Problem Set 4 |
11/12/13 |
11/26/13 |
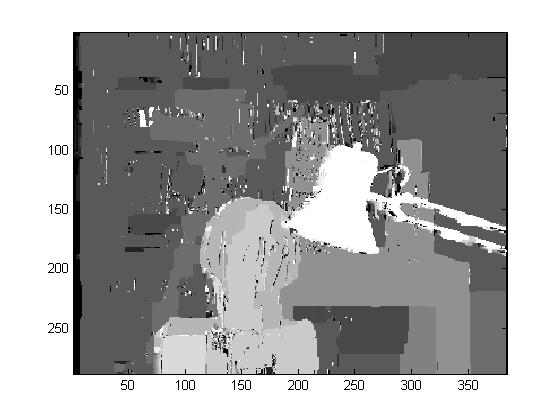
Stereo matching with graph cuts. Problem Set. First test image pair: I1L.jpg I1R.jpg Second test image pair: T3bw.jpg T4bw.jpg Tresult.jpg |
|
Problem Set 5 |
11/26/13 |
12/10/13 |
Bag of words classification. Problem Set. ps5.m |
|
Review for Final |
12/3/13 |
|
Class Schedule
This schedule should be considered more of a guideline than a rigid plan.
Lectures
|
Class |
Topic |
Required |
Background |
Problem Sets |
|
1. 9/3 |
Introduction |
|
|
|
|
2. 9/5 |
Fourier 1 |
This material is covered in many
standard techniques. You might look at:A Wavelet Tour of Signal Processing
, by Mallat for this and material on
wavelets. Chapters 2 and 3 are on the Fourier Transform. I also like the discussion in Elementary
Functional Analysis by Shilov (This is part of
the Dover Classics series, so there is a cheap paperback edition). Some of this
material is discussed in Forsyth and |
|
|
|
3. 9/10 |
Fourier 2 |
Szeliski, 3.2 and 3.4 |
||
|
4. 9/12 |
Diffusion and smoothing |
Diffusion Phenomena, by Ghez, Sections 1.1-1.4 (available from instructor) |
|
|
|
5. 9/17 |
Edge Detection |
|
Canny edge detector |
|
|
6. 9/19 |
Non-linear Diffusion |
"A review of nonlinear diffusion filtering," by Joachim Weickert. In Scale-Space Theory in Computer Vision, Lecture Notes in Computer Science, Vol. 1252, Springer, Berlin, pp. 3-28, 1997. |
See also Weickert's book: Anisotropic Diffusion in Image Processing |
|
|
7. 9/24 |
Bilateral Filtering and Normalized Cut |
Carlo Tomasi and Roberto Manduchi. Bilateral Filtering for Gray and Color Images. ICCV 1998. Jianbo Shi and Jitendra Malik. Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence , 22(8):888-905, August 2000. |
Michael Elad. On the Origin of the Bilateral Filter and ways to improve it. IEEE Trans. on Image Processing, 2002. Spectral graph cut from a filtering point of view, by Ye, Lin, Song, Chen and Jacobs. |
|
|
8. 9/26 |
K-means, E-M and Background Subtraction |
E-M, Mean shift, Mixtures of Gaussians Adaptive background mixture models for real-time tracking, by Stauffer and Grimson |
Forsyth and E-M tutorial by Szeliski, Section 5.3 |
|
|
9. 10/1 |
Texture |
Texture Synthesis by Non-parametric Sampling by Efros and Leung. Web page contains links to the paper and pseudocode. |
|
Texture synthesis |
|
10. 10/3 |
Markov Processes and Markov Random Fields |
|
|
|
|
11. 10/8 |
Graph cuts for segmentation and MRFs |
Interactive
Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D
images. |
|
|
|
12. 10/10 |
Features: corners and blobs |
For corners, see section in notes on edge detection. |
|
|
|
13. 10/15 |
Matching: SIFT and RANSAC |
David G. Lowe, "Distinctive image
features from scale-invariant keypoints,"
International Journal of Computer Vision, 60, 2 (2004), pp. 91-110. |
|
|
|
14. 10/17 |
Geometric transformations and mosaicing |
|
Mosaicing |
|
|
15. 10/22 |
Tracking |
An introduction to the Kalman filter, by Welch and Bishop (Section 1) Condensation: conditional density propagation for visual tracking by Isard and Blake |
Tutorial: the Kalman filter (contains a more complete derivation) |
|
|
16. 10/24 |
Biological Vision |
|
|
|
|
17. 10/29 |
Cameras, perspective projection, projective geometry |
|
|
|
|
18. 10/31 |
Stereo geometry |
Slides,
Szeliski, 11-11.1.1 |
|
Midterm |
|
19. 11/5 |
Stereo matching: dynamic programming and graph cuts |
Szeliski, 11.3-11.5.1 Fast approximate energy minimization via graph cuts, by Boykov, Veksler, and Zabih |
|
|
|
20. 11/7 |
Stereo, contd. |
|
|
|
|
21. 11/12 |
Review of midterm |
|
|
Graph cut
stereo |
|
22. 11/14 |
Optical flow and flow fields |
|
|
|
|
23. 11/19 |
Structure-from-motion with perspective, the Essential matrix |
Szeliski, 7.2 through 7.2.1 |
|
|
|
24. 11/21 |
Structure-from-motion with scaled orthographic projection, factorization |
Szeliski, 7.3 |
|
|
|
25. 11/26 |
Classification |
Slides (from Andrew Zisserman) Text (from Kristin Grauman) |
|
Bag of words classifier |
|
26. 12/3 |
Lighting |
Lambertian Reflectance and Linear Subspaces by Basri
and Jacobs |
|
|
|
27. 12/5 |
Review for final |
|
|
|
|
28. 12/10 |
Sliding window detection |
Rapid
object detection using a boosted cascade of simple features by Viola and
Jones |
|
|
|
29. 12/12 |
Detection: deformable part models, fine-grained classification |
|
P.
Felzenszwalb, R. Girshick, D. McAllester, D. Ramanan Pictorial
Structures for Object Recognition Pedro F. Felzenszwalb, Daniel P.
Huttenlocher |
|
|
12/16 8:00-10:00 |
FINAL |
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}